HITBOT էլեկտրական բռնակների շարք – Z-EFG-20 զուգահեռ էլեկտրական բռնակ


Գլխավոր կատեգորիա
Արդյունաբերական ռոբոտի թև / Համագործակցային ռոբոտի թև / Էլեկտրական բռնիչ / Խելացի ակտուատոր / Ավտոմատացման լուծումներ
Դիմում
SCIC Z-EFG շարքի ռոբոտային բռնակները փոքր չափի են՝ ներկառուցված սերվո համակարգով, որը հնարավորություն է տալիս ճշգրիտ կառավարել արագությունը, դիրքը և սեղմող ուժը: Ավտոմատացման լուծումների համար նախատեսված SCIC-ի առաջատար բռնակային համակարգը թույլ կտա ձեզ բացել նոր հնարավորություններ ավտոմատացման համար, որոնք դուք երբեք հնարավոր չէիք համարում:

Հատկանիշ

· Ներկառուցված կառավարիչ
· Կարգավորելի հարված և բռնելու ուժ
· Վերջը կարող է փոխարինվել՝ տարբեր կարիքներին հարմարվելու համար
· Վերցրեք փխրուն և դեֆորմացվող առարկաներ, ինչպիսիք են ձվերը,փորձանոթներ, օղակներ և այլն
· Կիրառել օդի աղբյուր չունեցող տեսարանների համար (օրինակ՝ լաբորատորիա, հիվանդանոց)
Ճշգրտություն՝ կառավարելու, փոքր տարածքում ամրացնելու համար, արագ և կայուն ամրացնելու համար
Մեծ սեղմող ուժ
Ընդհանուր հարվածը 20 մմ է, սեղմող ուժը՝ 80N։
Վերահսկողության ճշգրտություն
Կրկնելիություն՝ ±0.02 մմ
Երկար կյանքի տևողություն
Տասնյակ միլիոն ցիկլ, օդային բռնակից բացի
Կառավարիչը ներկառուցված է
Փոքր տարածք զբաղեցնող, հարմար է ինտեգրվելու համար։
Կառավարման ռեժիմ
Իմպուլսային, I/O կարգավորիչներ՝ տարբերակի համար
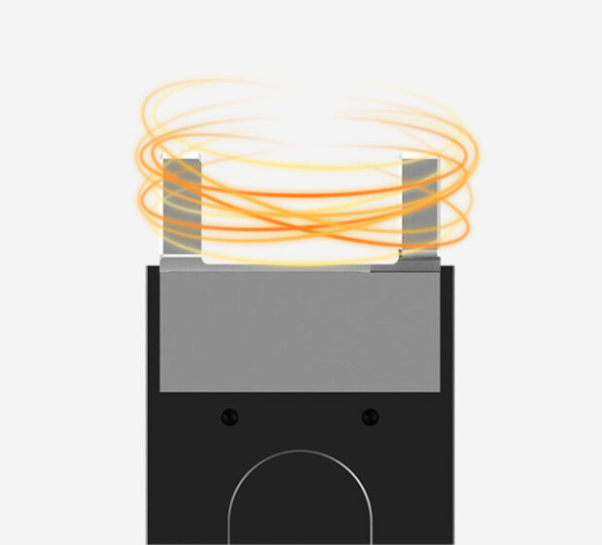
Փափուկ սեղմում
Այն կարող է սեղմել փխրուն առարկաները




Տեխնիկական բնութագրերի պարամետր
| Մոդելի համարը՝ Z-EFG-20 | Պարամետրեր |
| Ընդհանուր կաթված | 20 մմ |
| Բռնող ուժ | 30~80N |
| Կրկնելիություն | ±0.02 մմ |
| Առաջարկվող բռնելու քաշը | 0.8 կգ |
| Փոխանցում ռեժիմ | Ատամնաշարի դարակ + խաչաձև գլանաձև ուղեցույց |
| Շարժվող մասերի ճարպի համալրում | Յուրաքանչյուր վեց ամիսը մեկ կամ 1 միլիոն շարժում / ժամանակ |
| Միակողմանի շարժման ժամանակը | 0.45 վայրկյան |
| Աշխատանքային ջերմաստիճանի միջակայք | 5-55℃ |
| Աշխատանքային խոնավության միջակայքը | RH35-80(Սառնամանիք չկա) |
| Շարժման ռեժիմ | Երկու մատները շարժվում են հորիզոնական |
| Հարվածի վերահսկողություն | Կարգավորելի |
| Սեղմման ուժի կարգավորում | Կարգավորելի |
| Քաշը | 0.458 կգ |
| Չափսեր(L*W*H) | 44*30*124.7 մմ |
| Կարգավորիչի տեղադրում | Ներկառուցված |
| Հզորություն | 5W |
| Շարժիչի տեսակը | DC անխոզանակ |
| Առավելագույն հոսանք | 1A |
| Գնահատված լարում | 24 Վ |
| Սպասման հոսանք | 0.2Ա |
| Հարվածակայուն / թրթռակայուն | 98 մ/վ |
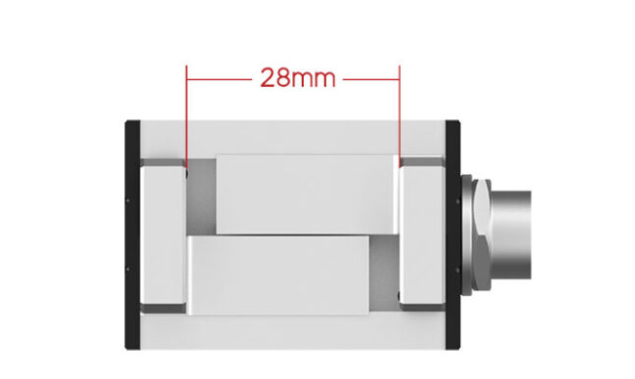
| Շարժիչի տրամագիծը | 28 մմ |
* Z-EFG-20 բռնելու ուժ. Բռնելու ուժը կարող է կարգավորվել՝ սարքի առջևի մասում կառավարվող դեֆորմացիոն նյութ ավելացնելով, որը ստացվում է դեֆորմացիայի և ուժի համապատասխան կորի համաձայն։
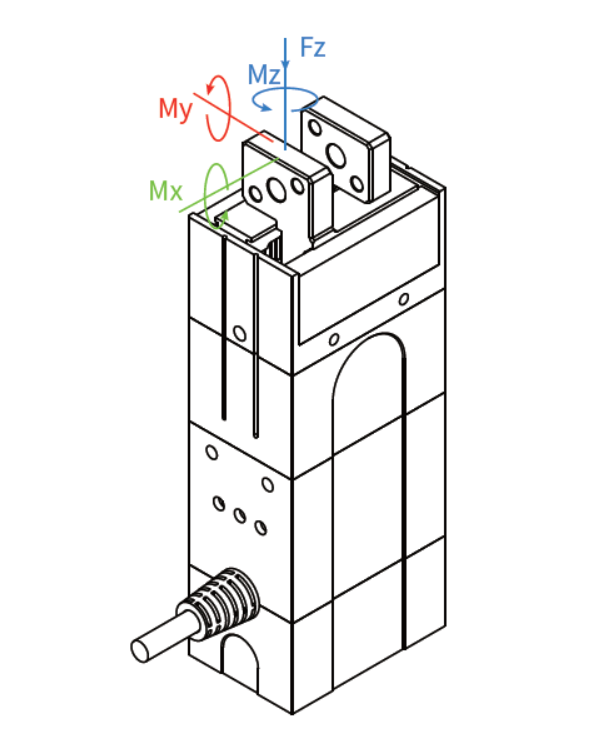
| Թույլատրելի ստատիկ բեռ ուղղահայաց ուղղությամբ | |
| Ֆզ: | 150Ն |
| Թույլատրելի պտտող մոմենտ | |
| Մաքսիմում։ | 2.1 Նմ |
| Իմ՝ | 2.34 Նմ |
| Մզ: | 2 Նմ |
Մեծ սեղմման ուժ, ճշգրտության ուժի կառավարում

Էլեկտրական բռնիչը կիրառում է փոխանցման տուփի հատուկ դիզայն և շարժիչի հաշվարկի փոխհատուցում, դրա սեղմման ուժը 80N անընդհատ կարգավորվող է, ընդհանուր հարվածը՝ 20 մմ, կրկնելիությունը՝ ±0.02 մմ։
Շարժման ռեժիմը և հարվածը կարգավորելի են
Էլեկտրական բռնիչի շարժումը պատկանում է երկու մատով զուգահեռ շարժմանը, մեկ հարվածի ամենակարճ ժամանակը ընդամենը 0.45 վայրկյան է, սեղմման քաշը՝ ≤0.8 կգ, այն կարող է բավարարել արտադրական գծի կայուն սեղմման պահանջը։
Կոմպակտ կառուցվածք, ճկուն տեղադրման համար։

Z-EFG-20-ի չափսերն են՝ L40*W30*H124.7 մմ, կառուցվածքը՝ կոմպակտ, աջակցում է հինգից ավելի տեղադրման ռեժիմների, ներկառուցված կառավարիչը զբաղեցնում է փոքր տարածք, ինչը հեշտացնում է տարբեր ամրակման աշխատանքներ կատարելը։


Ինտեգրված կառավարման և կառավարիչի, փափուկ սեղմիչով

Z-EFG-20-ի պոչը կարող է հեշտությամբ փոխվել, հաճախորդները կարող են սեղմել իրենց պահանջվող առարկաները, նախագծել պոչը և պահպանել էլեկտրական բռնիչը՝ սեղմման առաջադրանքները առավելագույնս կատարելու համար։
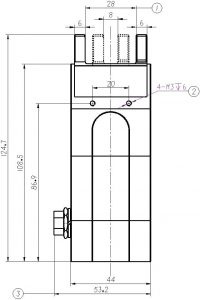
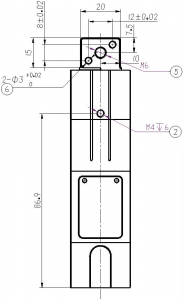
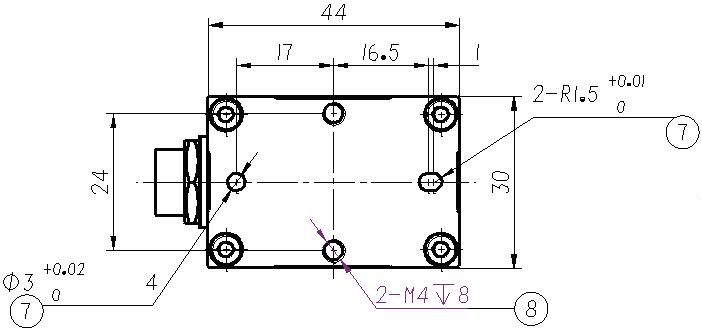
Չափերի տեղադրման դիագրամ
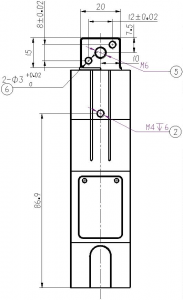
① Բռնող մատների շարժման հարվածը
② Կողային տեղադրման դիրք (պտուտակային անցք)
③ Ավիացիոն վարդակի լարերի տեղադրում
④ Բռնիչի կարգավորման ուժի դիրքը (ձախ) և ցուցիչ լույսը (աջ)
⑤ Բռնիչի տեղադրման դիրքը (պտուտակային անցք)
⑥ Բռնիչի տեղադրման դիրքը (քորոցի անցք)
⑦ Ստորին ամրացման դիրք (քորոցի անցք)
⑧ Ստորին տեղադրման դիրքը ((պտուտակային անցք)
Մեր բիզնեսը







