Համագործակցային պնևմատիկ երկու մատով փափուկ բռնիչով վակուումային գեներատոր ռոբոտների ավտոմատացման համար



Համագործակցային պնևմատիկ երկու մատով փափուկ բռնիչով վակուումային գեներատոր ռոբոտների ավտոմատացման համար
Գլխավոր կատեգորիա
Արդյունաբերական ռոբոտի թև / Համագործակցային ռոբոտի թև / Էլեկտրական բռնիչ / Խելացի ակտուատոր / Ավտոմատացման լուծումներ
Դիմում

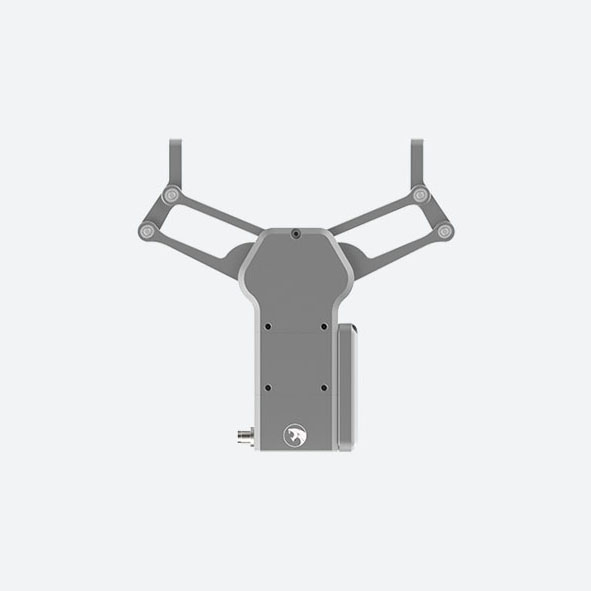
SCIC Z-EFG շարքի ռոբոտային բռնակները փոքր չափի են՝ ներկառուցված սերվո համակարգով, որը հնարավորություն է տալիս ճշգրիտ կառավարել արագությունը, դիրքը և սեղմող ուժը: Ավտոմատացման լուծումների համար նախատեսված SCIC-ի առաջատար բռնակային համակարգը թույլ կտա ձեզ բացել նոր հնարավորություններ ավտոմատացման համար, որոնք դուք երբեք հնարավոր չէիք համարում:
Հատկանիշ
· Մեծ հարված
· Կարգավորելի սեղմման ուժ և կարգավորելի հարված
· Երկար կյանք՝ տասնյակ միլիոնավոր ցիկլեր, գերազանցելով օդային ճանկերը
· Ներկառուցված կառավարիչ՝ փոքր չափս, հեշտ ինտեգրում
·EIA485 ավտոբուսի կառավարում, մուտք/ելք
Սեղմող ուժ՝ 40-130N, էլեկտրական բռնակի Y-ձև՝ 120 մմ հարվածով
Երկար հարված
Ընդհանուր հարված՝ 120 մմ
Կառավարման ռեժիմ
485 Modbus, EIA485, ավտոբուսի կառավարում
Սեղմող ուժ
Սեղմող ուժ՝ 40-130N կարգավորելի
Կառավարիչը ներսում
Փոքր տարածքի ընդգրկում, հեշտ ինտեգրվող
Ճշգրտության վերահսկում
Կրկնելիություն՝ ±0.02 մմ
Փափուկ սեղմում
Այն կարող է սեղմել փխրուն և դեֆորմացվող առարկաները

● Հեղափոխության խթանում պնևմատիկ բռնակները էլեկտրական բռնակներով փոխարինելու գործում, Չինաստանում առաջին էլեկտրական բռնակը՝ ինտեգրված սերվո համակարգով։
● Կատարյալ փոխարինող օդային կոմպրեսորի + ֆիլտրի + սոլենոիդային փականի + գազի փականի + պնևմատիկ բռնակի համար
● Բազմակի ցիկլերի ծառայության ժամկետ, որը համապատասխանում է ավանդական ճապոնական գլանի



Տեխնիկական բնութագրերի պարամետր
| Մոդելի համարը՝ Z-EFG-130 | Պարամետրեր |
| Ընդհանուր կաթված | 120 մմ |
| Բռնող ուժ | 40-130 հյուսիսային լայնություն |
| Կրկնելիություն | ±0.02 մմ |
| Առաջարկվող բռնելու քաշը | Առավելագույնը՝ 1 կգ |
| Փոխանցում ռեժիմ | Պտուտակային ընկույզ + միացում |
| Շարժվող մասերի ճարպի համալրում | Յուրաքանչյուր վեց ամիսը մեկ կամ 1 միլիոն շարժում / ժամանակ |
| Միակողմանի շարժման ժամանակը | 0.9 վայրկյան |
| Աշխատանքային ջերմաստիճանի միջակայք | 5-55℃ |
| Աշխատանքային խոնավության միջակայքը | RH35-80(Սառնամանիք չկա) |
| Շարժման ռեժիմ | Կապ |
| Հարվածի վերահսկողություն | Կարգավորելի |
| Սեղմման ուժի կարգավորում | Կարգավորելի |
| Քաշը | 0.8 կգ |
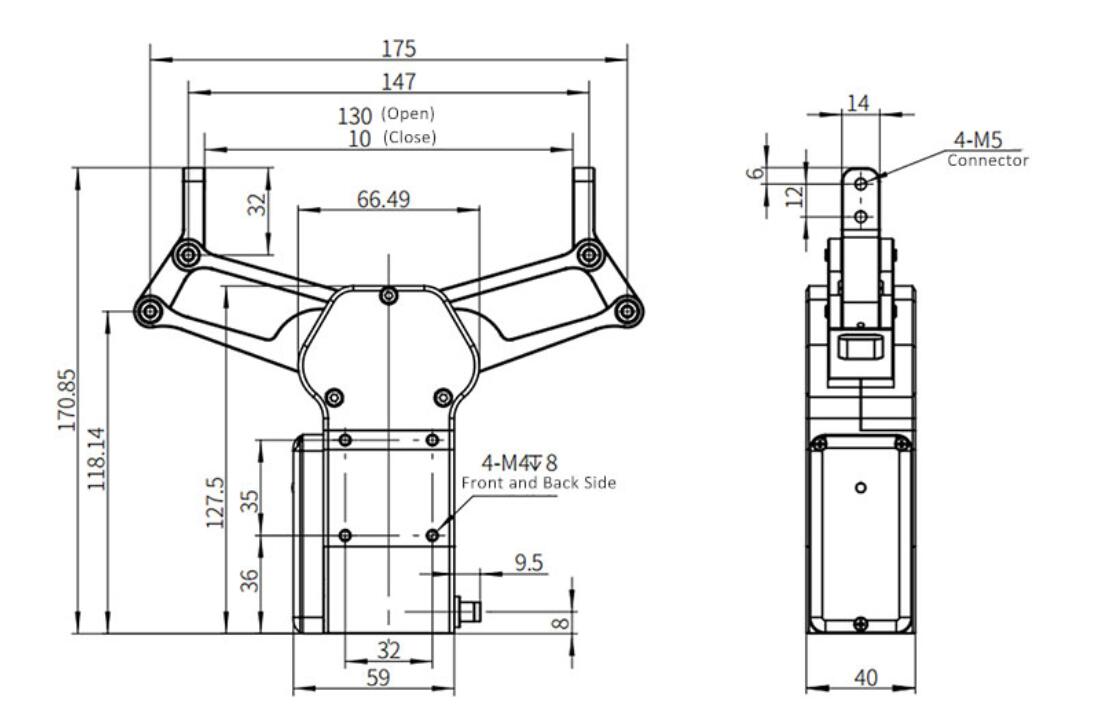
| Չափսեր(L*W*H) | 171*187*40մմ (բաց) 218*66.5*40մ (փակ) |
| Կարգավորիչի տեղադրում | Ներկառուցված |
| Հզորություն | 10 Վտ |
| Շարժիչի տեսակը | DC անխոզանակ |
| Առավելագույն հոսանք | 2A |
| Գնահատված լարում | 24 Վ |
| Սպասման հոսանք | 0.4A |
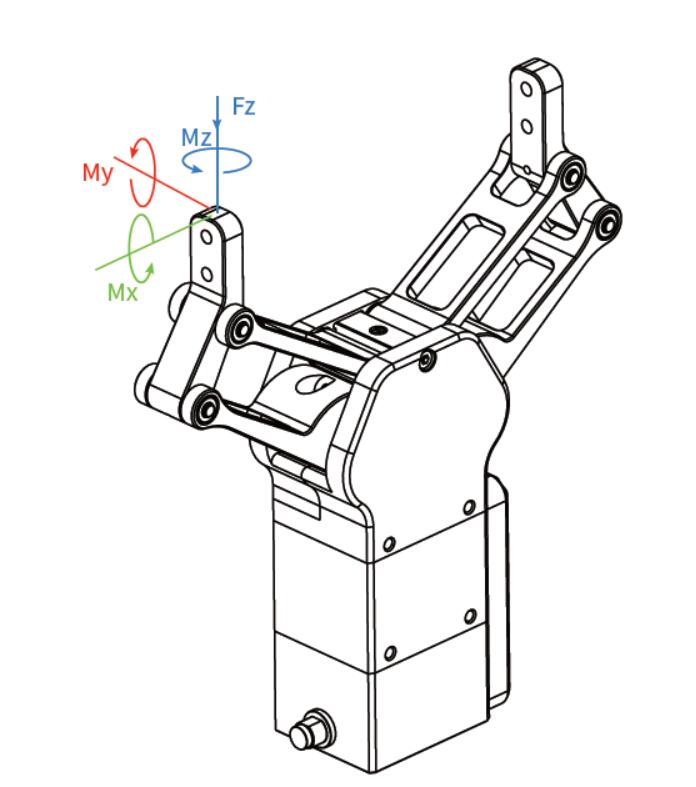
| Թույլատրելի ստատիկ բեռ ուղղահայաց ուղղությամբ | |
| Ֆզ: | 200Ն |
| Թույլատրելի պտտող մոմենտ | |
| Մաքսիմում։ | 2 Նմ |
| Իմ՝ | 2 Նմ |
| Մզ: | 2 Նմ |
Միացրու և խաղա, հարմար է ինտեգրելու համար
Z-EFG-130 էլեկտրական բռնիչը կարող է համատեղելի լինել համագործակցային ռոբոտ-բազկի հետ, և այն ներսում ունի ինտեգրված սերվո համակարգ, միայն մեկ բռնիչը կարող է համարժեք լինել կոմպրեսորին + ֆիլտրին + սոլենոիդային փականին + գազի փականին + օդային բռնիչին։


Երկար հարված, հիանալի համատեղելիություն
Էլեկտրական բռնիչի արդյունավետ հարվածը կարող է լինել մինչև 120 մմ, դրա փակման չափը՝ 10 մմ, էլեկտրական բռնիչը կարող է օգտագործվել կիսահաղորդչային չիպի, 3C էլեկտրոնային և այլ ճշգրիտ արդյունաբերությունների համար և այլն:
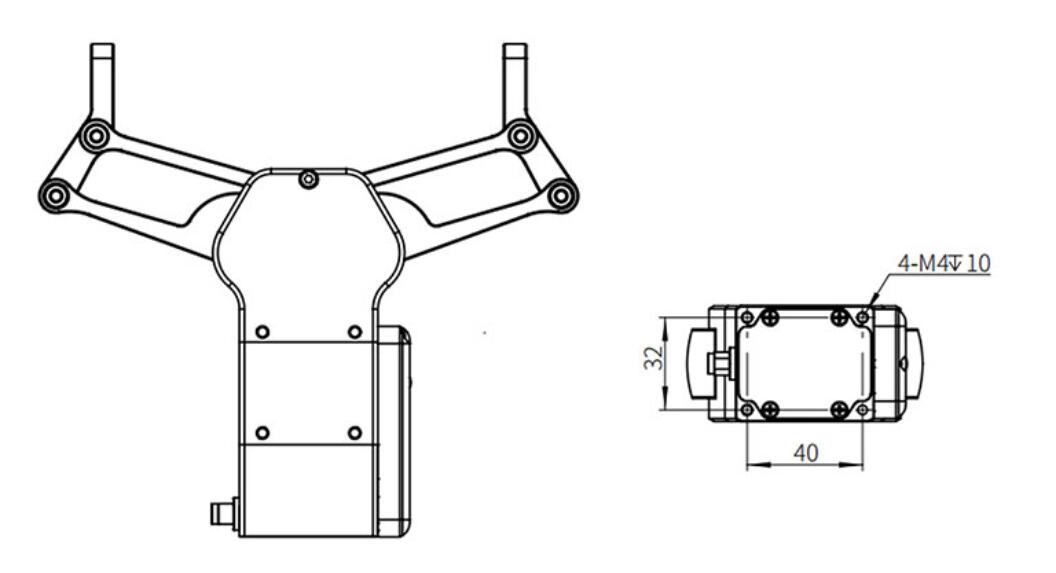
Փոքր չափս, հարմար է ինտեգրման համար

Z-EFG-130-ի բացման չափը 171*187*40 մմ է, փակման չափը՝ 218*66.5*40 մմ, այն կոմպակտ կառուցվածք ունի, աջակցում է բազմակի տեղադրման տեսակներին, այն ներսում կառավարիչ է, ծածկված է փոքր տարածքով։

Ճշգրտության ուժի կառավարում
Էլեկտրական բռնիչը նախատեսված է հատուկ փոխանցման տուփի դիզայնի և փոխանցման ալգորիթմի փոխհատուցման համար, սեղմման ուժը կարգավորելի է 40-130N, առաջարկվող սեղմման քաշը՝ ≤1 կգ, և այն կարող է ապահովել ±0.02 մմ կրկնելիություն։
Ադապտիվ բռնվածք, փոփոխվող պոչ

Z-EFG-130-ի էլեկտրական բռնիչը ապահովում է ադապտիվ ամրացում, այն ավելի հարմար է շրջանաձև, գնդաձև կամ հատուկ ձևի առարկաների համար, դրա պոչային մասերը կարող են հեշտությամբ փոփոխվել, հաճախորդները կարող են ամրացնել առարկաները իրենց պահանջներին համապատասխան։


Բազմակի կառավարման ռեժիմներ, հեշտ է գործել

Էլեկտրական բռնիչը կարող է ճշգրտորեն կառավարվել Modbus-ի միջոցով, դրա կոնֆիգուրացիան պարզ է, թվային մուտքի/ելքի հաղորդակցման արձանագրությունն օգտագործելու համար անհրաժեշտ է ընդամենը մեկ մալուխ՝ միացման/անջատման միացմանը միանալու համար, այն համատեղելի է PLC հիմնական կառավարման համակարգի հետ։
Բեռի ծանրության կենտրոնի շեղում
Մեր բիզնեսը


Ապրանքների կատեգորիաներ
-

Մրցունակ գին արդյունաբերական ռոբոտ 6 առանցք մանիպուլյատոր...
-

Արդյունաբերության բարձր արագությամբ ձվի և մրգերի հավաքում և տեղադրում 4 ...
-

Dobot վեց առանցքային համագործակցային ռոբոտ-բազուկի հոդային սարք...
-

Երկար ռոբոտային ձեռքով բանակային հեռադիտակային մանիպուլյատոր 20...
-
Թեժ վաճառք՝ մետաղական 6-առանցքանի մեխանիկական ռոբոտ-բազուկ...
-

Արդյունաբերական մեքենայի ռոբոտային թևի 4 առանցքային մանիպուլյատոր...