CNC հղկող ռոբոտային թև՝ 6 առանցք ալյումինե արդյունաբերական մինի ռոբոտային թև՝ 6 կգ կրթական ռոբոտային թև





CNC հղկող ռոբոտային թև՝ 6 առանցք ալյումինե արդյունաբերական մինի ռոբոտային թև՝ 6 կգ կրթական ռոբոտային թև
Գլխավոր կատեգորիա
Արդյունաբերական ռոբոտի թև / Համագործակցային ռոբոտի թև / Էլեկտրական բռնիչ / Խելացի ակտուատոր / Ավտոմատացման լուծումներ
Դիմում
SCIC Z-Arm կոբոտները թեթև, 4-առանցքային համագործակցային ռոբոտներ են՝ ներսում ներկառուցված շարժիչով, և այլևս չեն պահանջում ռեդուկտորներ, ինչպես մյուս ավանդական SCAR-ները, ինչը 40%-ով կրճատում է արժեքը։ SCIC Z-Arm կոբոտները կարող են իրականացնել գործառույթներ, ներառյալ, բայց չսահմանափակվելով դրանցով՝ 3D տպագրություն, նյութերի մշակում, եռակցում և լազերային փորագրություն։ Այն ի վիճակի է զգալիորեն բարելավել ձեր աշխատանքի և արտադրության արդյունավետությունն ու ճկունությունը։
Հատկանիշներ

Բարձր ճշգրտություն
Կրկնելիություն
±0.05 մմ
Մեծ բեռնվածություն
4 կգ կանգնել
Առավելագույնը 5 կգ
Ավելի բարձր արագություն
Առավելագույն գծային արագություն՝ 1.4 մ/վ
(Կանգնած բեռը՝ 4 կգ)
Մրցակցային գին
Արդյունաբերական մակարդակի որակ
Cմրցակցային գին
Հեշտ ծրագրավորվող, արագ տեղադրվող, ճկուն 4-առանցքանի ռոբոտի ձեռք
Բարձր բեռ
Ստանդարտ բեռնվածություն՝ 4 կգԱռավելագույն բեռը՝ 5 կգ
Բարձր ճշգրտություն
Կրկնելիություն՝ ±0.05 մմ
Անհատականացված Z-առանցք
Վերև և ներքև շարժումները կարող են հարմարեցվել 10 մմ-ից մինչև 1000 մմ
Բարձր արագություն
Գծային արագությունը մինչև 1400 մմ/վրկ է 4 կգ բեռնվածության դեպքում
Հեշտ է օգտագործել
Այն նաև հեշտ է օգտագործել նույնիսկ նրանց համար, ովքեր նախկինում չգիտեին ռոբոտի մասին
Ինտեգրված շարժիչ և կառավարիչ
Լրացուցիչ միացում չկա, հեշտ է տեղադրել և հավաքել

Առնչվող ապրանքներ



Տեխնիկական բնութագրերի պարամետր
SCIC Z-Arm 4150-ը նախագծվել է SCIC Tech-ի կողմից, այն թեթև, հեշտ ծրագրավորվող և օգտագործվող, SDK աջակցող, բախման հայտնաբերման աջակցությամբ ռոբոտ է, այսինքն՝ մարդուն դիպչելիս այն ավտոմատ կերպով կանգ է առնում, ինչը խելացի մարդ-մեքենա համագործակցություն է, անվտանգությունը բարձր է։
| Z-Arm 4150 համագործակցային ռոբոտային ձեռք | Պարամետրեր |
| 1 առանցքի թևի երկարություն | 275 մմ |
| 1 առանցքի պտտման անկյուն | ±90° |
| 2 առանցքային թևի երկարություն | 225 մմ |
| 2 առանցքի պտտման անկյուն | ±164° (ըստ ցանկության՝ 15-345°) |
| Z առանցքի հարված | 410 Բարձրությունը կարող է հարմարեցվել |
| R առանցքի պտտման միջակայքը | ±1080° |
| Գծային արագություն | 1400 մմ/վ (օգտակար բեռ 4 կգ) |
| Կրկնելիություն | ±0.05 մմ |
| Ստանդարտ օգտակար բեռ | 4 կգ |
| Առավելագույն բեռ | 5 կգ |
| Ազատության աստիճան | 4 |
| Էլեկտրամատակարարում | 220V/110V50-60HZ հարմարվում է 48VDC գագաթնակետային հզորությանը՝ 960W |
| Հաղորդակցություն | Էթերնեթը |
| Ընդլայնելիություն | Ներկառուցված շարժման կարգավորիչը ապահովում է 24 մուտք/ելք + թևատակի ընդլայնում |
| Z-առանցքը կարող է հարմարեցվել բարձրության վրա | 0.1մ~1մ |
| Z-առանցքի քարշակման ուսուցում | / |
| Էլեկտրական միջերեսը պաշտպանված է | Ստանդարտ կոնֆիգուրացիա՝ 24*23awg (անպաշտպան) լարեր՝ վարդակի վահանակից՝ ստորին թևի կափարիչի միջով Լրացուցիչ՝ 2 φ4 վակուումային խողովակներ՝ վարդակի վահանակի և եզրագծի միջով |
| Համատեղելի HITBOT էլեկտրական բռնակներ | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100/5-ըthAxis, 3D տպագրություն |
| Շնչող լույս | / |
| Երկրորդ ձեռքի շարժման միջակայքը | Ստանդարտ՝ ±164° Լրացուցիչ՝ 15-345° |
| Լրացուցիչ պարագաներ | / |
| Օգտագործեք միջավայրը | Շրջակա միջավայրի ջերմաստիճանը՝ 0-45°C Խոնավություն՝ 20-80%RH (առանց սառնամանիքի) |
| Մուտքային/ելքային միացքի թվային մուտք (մեկուսացված) | 9+3+ նախաբազկի երկարացում (ըստ ցանկության) |
| Մուտքային/ելքային միացքի թվային ելք (մեկուսացված) | 9+3+ նախաբազկի երկարացում (ըստ ցանկության) |
| Մուտք/ելք անալոգային մուտք (4-20մԱ) | / |
| Մուտք/ելք միացք անալոգային ելք (4-20մԱ) | / |
| Ռոբոտի ձեռքի բարձրությունը | 830 մմ |
| Ռոբոտի ձեռքի քաշը | 410 մմ հարվածի զուտ քաշը՝ 28 կգ |
| Հիմքի չափսը | 250մմ*250մմ*15մմ |
| Հիմքի ամրացման անցքերի միջև հեռավորությունը | 200մմ*200մմ չորս M8*20 պտուտակներով |
| Բախման հայտնաբերում | √ |
| Դրագ դասավանդում | √ |
Առավելագույն բեռը՝ 5 կգ, իդեալական ընտրություն հավաքման աշխատանքների համար
Z-Arm XX50-ը ճկուն 4-առանցքանի ռոբոտ-ձեռք է, որի առավելագույն բեռնվածությունը կարող է լինել մինչև 5 կգ, զբաղեցնելով փոքր տարածք, շատ հարմար է աշխատանքային կայանի կամ մեքենաների ներսում տեղադրելու համար, այն իդեալական ընտրություն է ավտոմատ հավաքման արտադրական գծերի համար։

Թեթև, մեծ պտտման անկյուն

Դրա արտադրանքի քաշը մոտ 28 կգ է, բազկի բացվածքը՝ մինչև 275 մմ, 1 առանցքի պտտման անկյունը՝ ±90°, 2 առանցքի պտտման անկյունը՝ ±164°, R առանցքի պտտման միջակայքը կարող է հասնել ±1080°-ի։
Դրա բարձրությունը կարող է հեշտությամբ կարգավորվել
Ինտեգրված շարժիչ և կառավարիչ, առանց լրացուցիչ միացման սխեմայի, հեշտ է տեղադրել և ինտեգրվել, Z-առանցքի բարձրությունը կարող է հարմարեցվել 10 մմ-1000 մմ-ի միջև, այն կարող է իրականացնել ներքին պտույտ՝ խոչընդոտներից խուսափելու համար։

Ճկուն է տեղակայման համար, արագ է փոխվում
Z-Arm XX50-ը բարձր ինտեգրացիոն ռոբոտ-ձեռք է, որն ունի տարածք խնայելու և ճկուն տեղակայման բնութագրեր, այն հարմար է տեղակայելու բազմաթիվ կիրառություններում, չունի արտադրության սովորական դասավորության փոփոխության հնարավորություն, այդ թվում՝ արագ անցում և փոքր խմբաքանակի արտադրությունն ավարտելու հնարավորություն և այլն։
Հիանալի համագործակցություն և անվտանգություն
Ռոբոտի ձեռքը կարող է համագործակցել մարդու հետ՝ առանց լրացուցիչ պաշտպանության, փոխարինելու կեղտոտ, վտանգավոր և ձանձրալի աշխատանքները, խուսափելու և նվազեցնելու կրկնվող լարվածության և պատահական վնասվածքները։

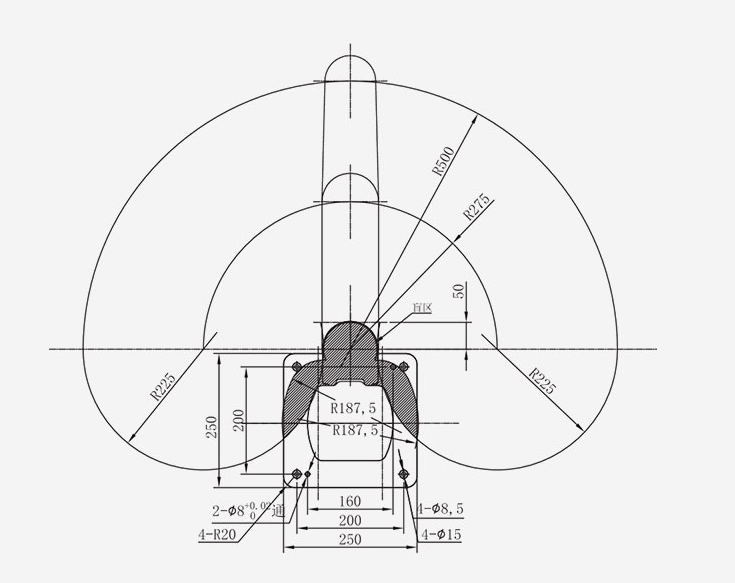
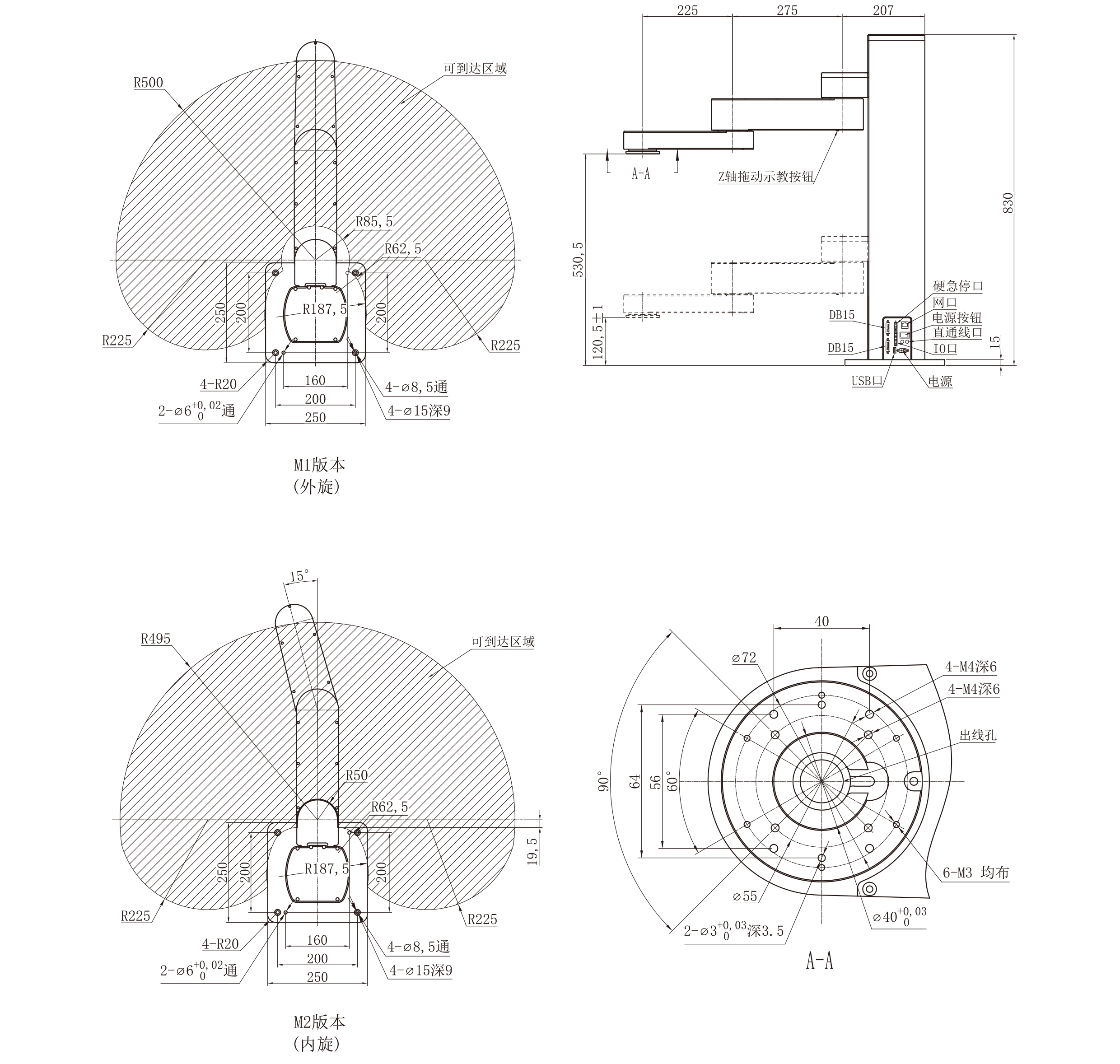
Շարժման միջակայք M1 տարբերակ (պտտել դեպի դուրս)
DB15 միակցիչի առաջարկություն

Առաջարկվող մոդել՝ Ոսկեզօծված արական սեռի ներկայացուցիչ՝ ABS պատյանով, YL-SCD-15M, Ոսկեզօծված էգ սեռի ներկայացուցիչ՝ ABS պատյանով, YL-SCD-15F
Չափսերի նկարագրություն՝ 55մմ*43մմ*16մմ
(Տես նկար 5-ը)
Ռոբոտի ձեռքի արտաքին օգտագործման միջավայրի դիագրամ

Մեր բիզնեսը


Ապրանքների կատեգորիաներ
-

Ավտոմատացված փոխադրիչ համակարգերի գործարան Փոքր 6 առանցք...
-

Եռակցման ռոբոտի 6 առանցք ունեցող թև, 1300 մմ հեռավորության վրա, օգտակար բեռնվածությամբ...
-

4086 Բարձր գնով կատարողականությամբ մինի ռոբոտային թևի արդյունաբերություն...
-

Թեթև արդյունաբերական մանիպուլյատոր Smart Collab...
-

CNC խառատային կենտրոնի համագործակցային ռոբոտային թև 6 կացինով...
-
Արդյունաբերական հղկող, փայլեցնող ռոբոտային բազուկի մեխանիկական...